SES-V1 Legged Robots
SES-V1 Legged Robot
Programmable or RC controlled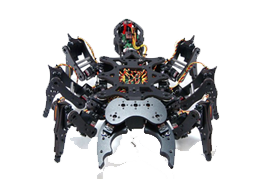

SES-V1 LEGGED ROBOT DETAILS
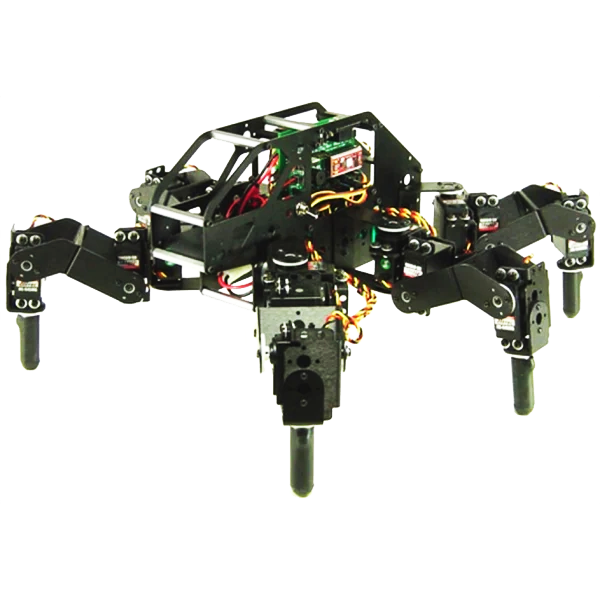
Lynxmotion was one of the first companies to commercialize hexapod and biped robots intended for the hobbyist and educational markets. These versatile kits are not toys – they use advanced inverse kinematics and provide the hardware needed for legged experimentation. Most frames are made out of durable aluminum brackets, and all frames use quality high quality Hitec servo motors. Not only are more complete kits available, but body and leg assemblies can be purchased to “mix and match” to your preferred hexapod design.
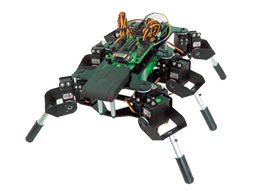
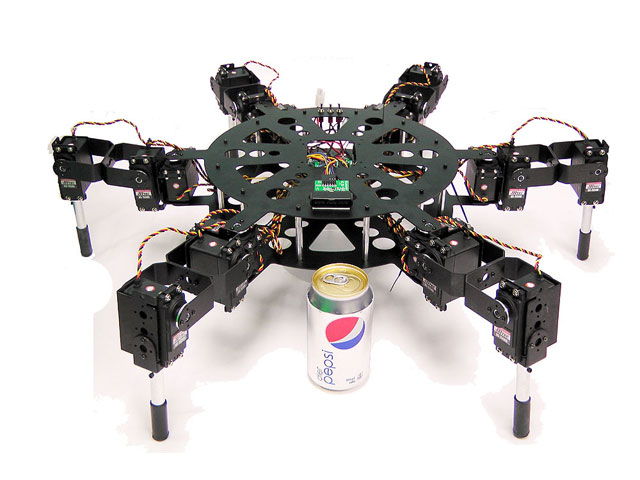
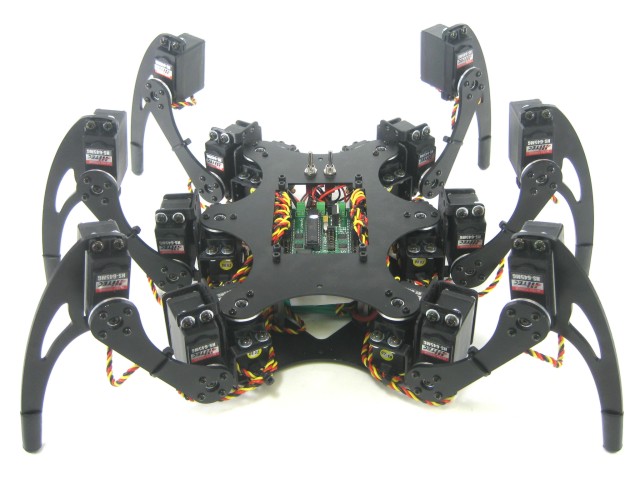
Most designs are based around the Lynxmotion Servo Erector Set (SES) V1 modular robot construction system and the selection of hexapod bodies includes fully symmetric round frames for omnidirectional motion, as well as unique designs like the Phoenix, T-hex and A-Pod. Each leg has between two to four degrees of freedom (DoF) and actuation at each joint is accomplished using durable and high quality Hitec RC servo motors. Brackets are made from durable aluminum, and plastic parts are black polycarbonate. All but a few hexapods use both an SSC-32U RC servo controller paired with the programmable, Arduino-compatible BotBoarduino microcontroller. The community-developed Phoenix sample code provides an excellent starting point for multi-legged robot experimentation, and is meant to use the versatile wireless PS2 controller (available separately).
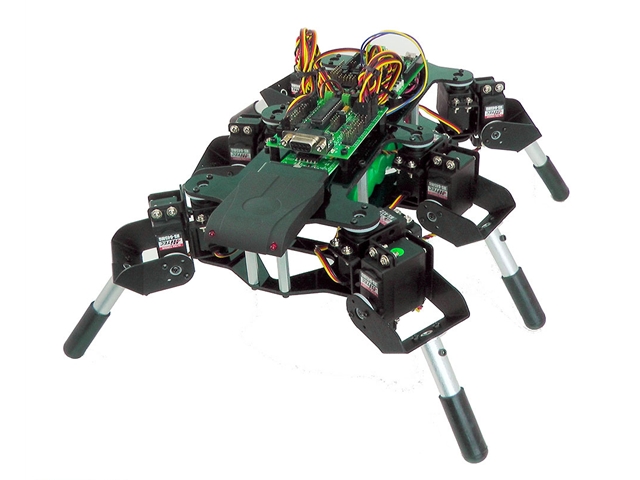
One example of a quadrapod designed using the SES v1 system is the SQ3 (Symmetric Quad 3Dof) which is a 12 degree of freedom (DoF) quadruped robot with a symmetric body design. The robot’s symmetry and three DoF legs make this a very unique quadruped walker allowing it to walk in any direction. This research level robot is perfect for college robotics labs and individuals looking to get started with experimenting with more complex legged robots.
Lynxmotion’s Bipedal Robotic Articulating Transport, or “BRAT” is an inexpensive and simple six servo biped walking robot intended for bipedal development. Using only three degrees of freedom (DOF) per leg the robot can walk forward or backwards, turn in place and get up after a fall. It can even do Robo-One style acrobatic moves. The BRAT combo kits include almost everything needed to make an operational robot (battery and handheld remote sold separately). More complex bipedal designs can be created as well using the SES V1 system, of which the Scout and Pete are excellent examples. Lynxmotion’s Pete is a 22 degree of freedom humanoid with arms and hands. The Scout robot is a “Mech-like” walking robot with six degrees of freedom per leg. Partial Pete and Scout kits were created due to demand, though no sample code is available
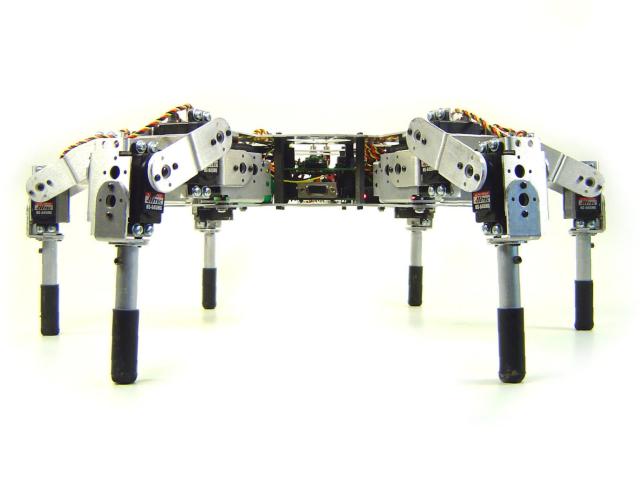
QUALITY SYSTEMDurable yet lightweight parts and quality RC servos | The servo used at each joint has been chosen specifically to provide optimal weight vs torque. Hitec RC servos have proven to offer excellent value, high quality and last for a very long time. Most hexapod designs are based on the Lynxmotion Servo Erector Set (SES) modular robotic construction system which uses aluminum brackets and polycarbonate plastic. |
SAMPLE CODEVersatile sample walking code | The Phoenix walking code was originally written by Jeroen Janssen (Xan) for the Lynxmotion Phoenix hexapod robot. The Lynxmotion Phoenix was based of off the original Phoenix designed by KÂre Halvorsen (Zenta). Kurt Eckhardt (KurtE) ported the code to C/C++ and the Arduino environment with the help of Xan and Zenta. Kurt’s port of the Phoenix code currently supports a wide variety of legged robots and can be used with the Lynxmotion BotBoarduino microcontroller and SSC-32U servo controller. |
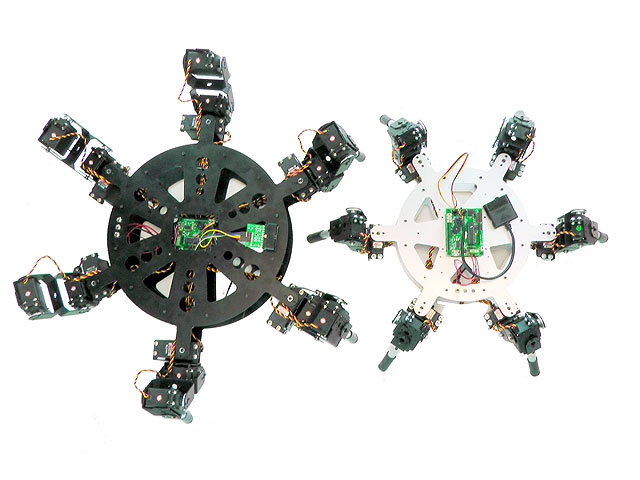
UNIQUE DESIGNSDifferent hexapods for different tastes | Hexapods with symmetric (circular) bodies and three degrees of freedom (3DoF) legs include the AH3, MAH3, BH3, CH3. Hexapods with 2DoF legs include the AH2 and MH2. Additional hexapods include the popular Phoenix, T-Hex and A-Pod. Body and legs kits are also available separately. |
QUALITY SYSTEM
Durable yet lightweight parts and quality RC servos
The servo used at each joint has been chosen specifically to provide optimal weight vs torque. Hitec RC servos have proven to offer excellent value, high quality and last for a very long time. Most hexapod designs are based on the Lynxmotion Servo Erector Set (SES) modular robotic construction system which uses aluminum brackets and polycarbonate plastic.
SAMPLE CODE
Versatile sample walking code
The Phoenix walking code was originally written by Jeroen Janssen (Xan) for the Lynxmotion Phoenix hexapod robot. The Lynxmotion Phoenix was based of off the original Phoenix designed by KÂre Halvorsen (Zenta). Kurt Eckhardt (KurtE) ported the code to C/C++ and the Arduino environment with the help of Xan and Zenta. Kurt’s port of the Phoenix code currently supports a wide variety of legged robots and can be used with the Lynxmotion BotBoarduino microcontroller and SSC-32U servo controller.
UNIQUE DESIGNS
Different hexapods for different tastes
Hexapods with symmetric (circular) bodies and three degrees of freedom (3DoF) legs include the AH3, MAH3, BH3, CH3. Hexapods with 2DoF legs include the AH2 and MH2. Additional hexapods include the popular Phoenix, T-Hex and A-Pod. Body and legs kits are also available separately.
OTHER INFORMATION
Assembly Guides
See how the parts which make up the Servo Erector Set v2 system are used to easily build a variety of complex robots
Sample Code
Lynxmotion’s GitHub page has sample code using FlowBotics Studio, interfaces or Arduino-based code for programmable legged robots
Electronics Guides
Details on how to use the BotBoarduino, SSC-32U servo controller, PS2 and more.
SES 3D Models
Community generated CAD files for parts, assemblies and some robots
Images
Selection of photos showing legged robots made using the SES v1 system.
Videos
Check out SES-V1 Legged Robot official Lynxmotion videos as well as user-generated content on YouTube.
PHOTOS




















FEATURED PRODUCTS

Brat + FlowBotics
The Lynxmotion Biped BRAT is a serial port-based version Biped BRAT combo kit with FlowBotics Studio software. BRAT stands for Bipedal Robotic Articulating Transport. The robot is a 6 servo biped walker featuring three degrees of freedom (DOF) per leg.

SQ3 + FlowBotics
The Lynxmotion Symmetric Quadruped Kit (FlowBotics Studio) is the FlowBotics Studio version of the 3DoF per leg quadruped robot with a symmetric body design. The included SSC-32 servo controller is controlled from a computer running FlowBotics .
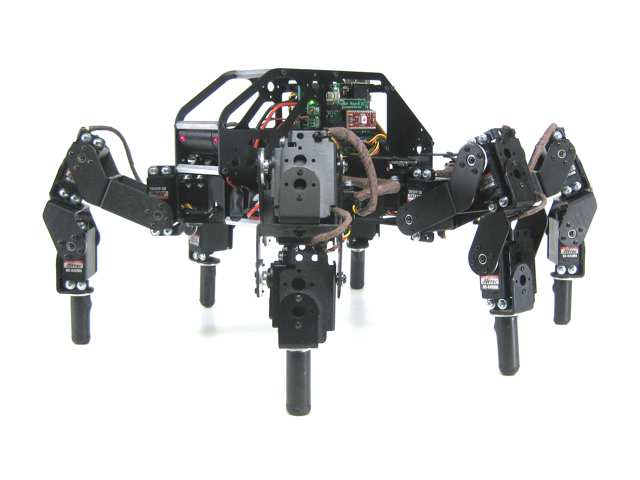
T-Hex 3DoF + BotBoarduino
The Lynxmotion T-Hex 3DOF Hexapod Robot Kit (BotBoarduino) is Mech inspired with three DOF (degree of freedom) legs meaning the robot can walk in any direction. The robot has been designed to use 18x HS-645 servos for the legs.

Phoenix + BotBoarduino
The Lynxmotion Phoenix 3DOF Hexapod Robot Kit has a more natural looking, more articulate leg and body design. The three DOF (degree of freedom) leg design means this robot can walk in any direction. The robot uses 18 Hitec HS-645 servos.
SES-V1 Legged Images
Programmable or RC controlled
Programmable or RC controlled
Programmable or RC controlled
Programmable or RC controlled